|
La majoria dels processos de les botigues minoristes depenen d'un inventari perpetu i altament precís: gestió i previsió d'existències, compliment, comandes, etc. Tot i això, els sistemes d'inventari perpetu són inexactes a causa dels robatoris i pèrdues, i els inventaris manuals, fins i tots els que utilitzen identificació per radiofreqüència (RFID) són costosos i tediosos. Amb el temps, s'han desenvolupat tres solucions més al mercat: prestatges intel·ligents, antenes aèries i robots d'inventaris.
Un equip d'investigadors de la Universitat Pompeu Fabra (UPF) liderats per Rafael Pous, del Departament de Tecnologies de la Informació i les Comunicacions (DTIC) han desenvolupat un nou sistema de robot d'inventaris que millora les prestacions dels actuals. Pous explica que els actuals no són completament autònoms i requereixen la creació manual d'un mapa de la botiga abans que puguin operar en ella.
Per això, en l'article publicat el 26 de juny a la revista 'Computers in Industry', l'equip proposa una solució per al problema del recompte d'existències en botigues minoristes basada en un sistema multi-robot. Es desenvolupa doncs, un algorisme que determina l'estat del problema utiltizant les mateixes etiquetes RFID que els minoristes afegeixen als seus articles perquè puguin guiar el robot a través d'una tasca completa de comptatge d'existències. La simulació i les proves dels resultats d'aplicar aquest algorisme s'han fet en l'entorn d'una biblioteca universitària i validen la seva aplicació amb xifres de precisió molt altes, de l'ordre del 99,5%.
Amb l'objectiu de disposar de plataformes mòbils completament autònomes per fer inventaris de botigues, aquest article proposa una nova implementació d'algorisme estigmèrgic per al recompte autònom d'existències d'un entorn desconegut i ric en RFID, com una gran botiga o una biblioteca.
Estigmèrgic vol dir que col·labora a través del medi físic, un concepte introduït per un estudiós de les formigues i que actualment forma part de l'anomenada intel·ligència d'eixam i intel·ligència artificial. Aquest tipus d'algorisme també és molt adequat per a la robòtica a causa de la seva capacitat intrínseca per simplificar el maquinari i el programari del robot i escalar a sistemes multi-robot.
Segons els autors, aquesta solució és ''completament autònoma'', ja que no requereix un mapa, ''escalable'' a qualsevol mida d'entorn, requereix menys recursos computacionals i redueix significativament el cost ja que la solució pot ser implementada en robats ''més simples i més barats''.
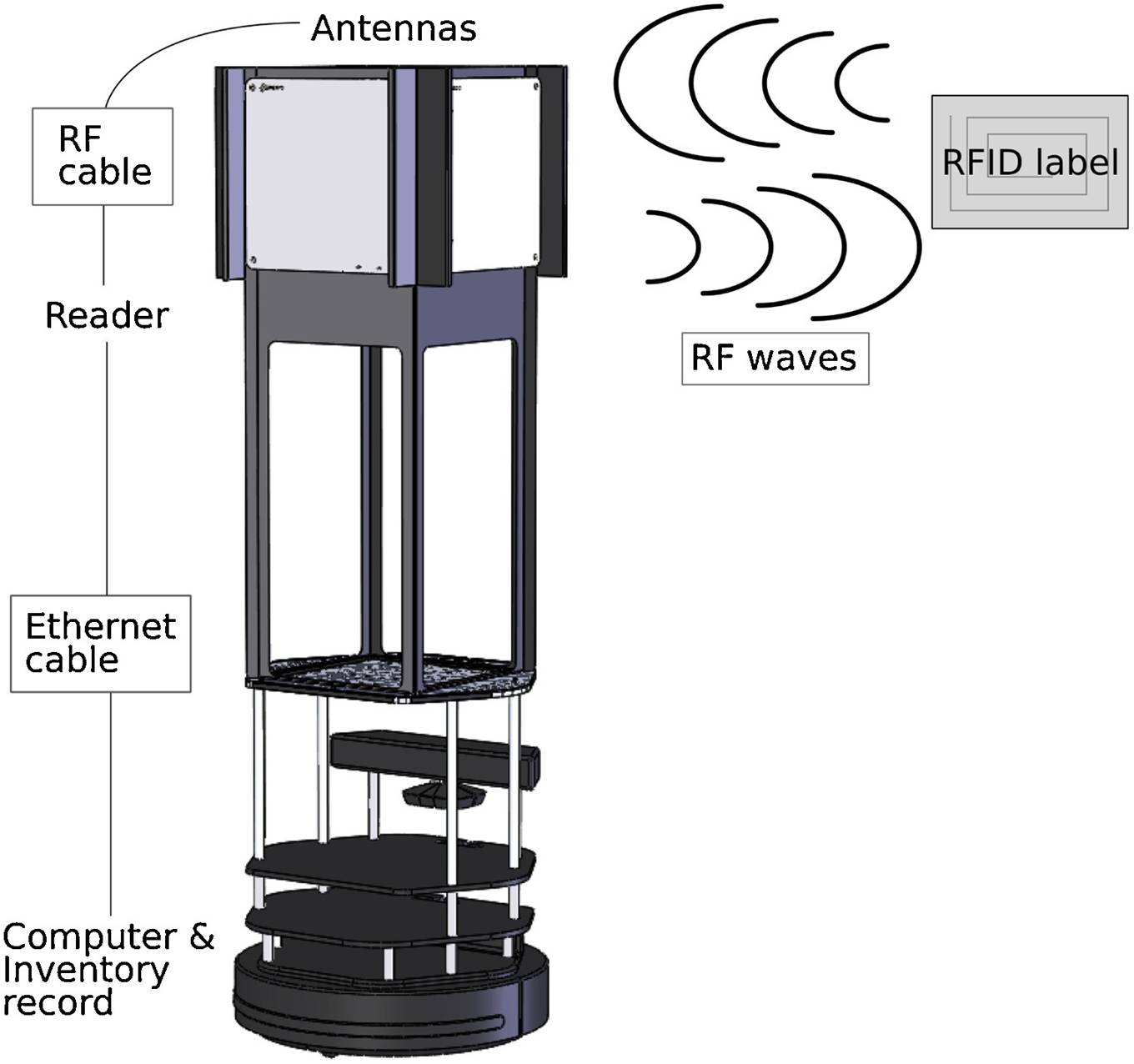
La millora s'aconsegueix mitjançant un canvi de paradigma en la manera de treballar del robot: enlloc de navegar en base a objectius d'inventari prèviament registrats, utilitza identificacions RFID en viu de les etiquetes presents a la botiga coma referència per completar el recompte d'existències. A més, diversos robots poden col·laborar mitjançant la detecció d'etiquetes RFID i completar la tasca de navegació en la mateixa botiga. És un comportament basat en l'observat en colònies d'insectes socials i per això es diu 'estigma', expliquen els autors.
El treball ha estat liderat per Rafael Pous i han participat Victor Casamayor Pujol, Marc Morenza-Cinos, Bernat Gascón, tots ells investigadors vinculats a l'Ubiquitous Computing Applications Laboratory (UbiCA Lab), del DTIC de la UPF. És un treball cofinançat pel Ministeri d'Economia i Competitivitat d'Espanya sota el programa d'Unitats d'Excel·lència Maria de Maeztu, així com pel Ministeri de Ciència i Innovació i Universitats d'Espanya en el marc del Programa Reptes Col·laboració.ivament el cost atès que la solució pot ser implementada en robots més simples i més barats", sostenen els autors.
|